 |
 |
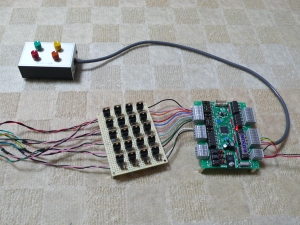
| MTS-EN01 を使用して、おもちゃロボットアームを自動化してみました。 ベース:エレキットのロボットアームMR-999 使用言語:CCS-C PCM |
  |
自動ロボットアームの概略図
(クリックすると別ウィンドウで拡大します。)  |
自動ロボットアームの概要
モーターを動かす為には大きな電流が必要ですが、 MTS-EN01 の出力吸込電流は、50mA なので、直接モーターはつなげません。 今回は、トランジスタを使ってHブリッジ回路を作り、モーターを動かしています。 トランジスタによるHブリッジ回路
TR3,4・TR5,6 を ON すると、モーターの+に VCC(3V) 、−に GND がつながり、正回転します。 TR1,2・TR7,8 を ON すると、モーターの−に VCC(3V) 、+に GND がつながり、逆回転します。 ブレーキは、モーター回転終了後、少しだけ逆回転させる事で実現しています。  ロボットアームの動作は、押しボタンスイッチによって一連動作します。 動作を変えるには、プログラムの変更が必要になります。 |
操作再生中のロボットアーム(再生ボタンをクリック)
|
なお、エンコーダーやリミットスイッチ等は使用していないので、 電池寿命や、掴む物の重さにより動きが変動します。 |
MTS-EN01 活用例メインページへ  |